2 releases
| 0.2.3 | Apr 29, 2024 |
|---|---|
| 0.2.2 | Apr 29, 2024 |
#1999 in Game dev
74 downloads per month
Used in 2 crates
2MB
2K
SLoC
Ryot PathFinder
![]()
![]()
![]()
![]()
![]()
What is Ryot PathFinder
Ryot PathFinder is a high-performance, asynchronous implementation of Pathfinding for Bevy. It is designed to work seamlessly with Bevy's ECS, providing robust pathfinding capabilities for games and simulations that demand dynamic navigation. Even though it's optimized for 2D grid-based environments, it can be easily extended to fit specific game requirements and open-world scenarios. It relies on Ryot Core and has a built integration with Ryot Tiled.
Pathfinding
Pathfinding is a fundamental concept in game development, enabling entities to navigate through complex environments efficiently. It involves finding the shortest path between two points, considering obstacles, and optimizing the route based on various criteria. Pathfinding algorithms are essential for creating engaging gameplay experiences, enabling characters to move intelligently and interact with the game world effectively.
In this context, Ryot PathFinder offers a comprehensive solution for implementing pathfinding systems in Bevy projects, providing a flexible and extensible framework for handling navigation logic. By leveraging asynchronous operations and seamless Bevy integration, developers can create dynamic pathfinding systems that adapt to changing game conditions and player interactions.
PathFinder uses Pathfinding as the underlying pathfinding library. For the 2D default implementation, it uses the A* algorithm to calculate the shortest path between two points.
Capabilities
- Seamless Bevy Integration: Built to work hand-in-hand with Bevy's ECS, offering smooth integration and ensuring compatibility with Bevy's event systems.
- Asynchronous Operations: Utilizes async tasks to maintain high performance and responsiveness, particularly suitable for scenarios with extensive pathfinding demands.
- 2D Optimization: Specially tailored for 2D grid-based navigation, providing robust tools for tile-based and open-world game environments.
- Extensible Architecture: Designed to be flexible, allowing developers to extend and customize pathfinding logic to fit specific game requirements.
Features
This crate includes an optional feature, ryot_tiled, which integrates with the Ryot Tiled crate to
support
tiled-2D specific pathfinding systems. This feature extends the pathfinding capabilities to work seamlessly with tiled
maps, adding valuable functionality for games using tile-based layouts.
Basic Setup
Before setting up the pathfinder, lets understand the two core concepts of the pathfinder: Pathable<P>
and Navigable<N>.
Pathable
The Pathable trait represents the position in the world. It's used to calculate the path between two points. The trait
requires the implementation of the generate method, which returns a pathable position based on (x, y, z),
a coordinates method that returns the coordinates of the pathable position, and a path_to method that calculates the
path to another pathable position.
Navigable
The Navigable trait belongs to ryot_core and is used to determine if a point is navigable or not. Currently, it
has two navigation conditions in a dimensional space: is_walkable and blocks_sight. The trait requires the
implementation of the is_walkable and blocks_sight methods, which return a boolean value based on the navigable
condition. The trait has an append method that appends the navigable value to another navigable value.
It also requires the implementation of the is_default method, which returns true if that implementation
corresponds to the default value (useful to skip unnecessary calculations).
Bevy
To integrate ryot_pathfinder you need to add a pathable to your Bevy app. This is done by calling the add_pathable
method on your Bevy app builder. A pathable is represented by a pair of Pathable and Navigable implementations <P, N>.
Here is a basic example with the pre-defined Pathable and Navigable implementations from ryot_tiled:
use bevy::prelude::*;
use ryot_pathfinder::prelude::*;
use ryot_core::prelude::*;
use ryot_tiled::prelude::*;
fn setup(mut commands: Commands) {
commands.spawn(PathFindingQuery::<TilePosition>::default());
}
fn build_app(app: &mut App) -> &mut App {
app
.add_plugins(DefaultPlugins)
.add_pathable::<TilePosition, Flags>()
}
Components
The PathFindingQuery has three main components:
PathFindingQuery<P>
This component is attached to entities that require a pathfinding computation. It specifies the parameters for the pathfinding algorithm:
- to: target position.
- cardinal_cost: cost of moving in the cardinal directions.
- diagonal_cost: cost of moving in the diagonal directions.
- success_distance: distance from the target position that is considered a successful pathfinding computation.
- timeout: maximum time in seconds that the pathfinding algorithm can run before returning None.
It's part of the public API and should be used by the user to trigger pathfinding computations.
PathFindingTask<P>
This component is attached to entities that are currently computing a pathfinding algorithm. It holds the future (or task) that will return the path result. It's internal to ryot_pathfinder and cannot be used by the user.
Path<P>
This component is attached to entities that have completed a pathfinding computation. It holds the result of the path finding computation, the actual path that the entity can follow to reach the target.
It's part of the public API and should be used by the user to move the entity along the path.
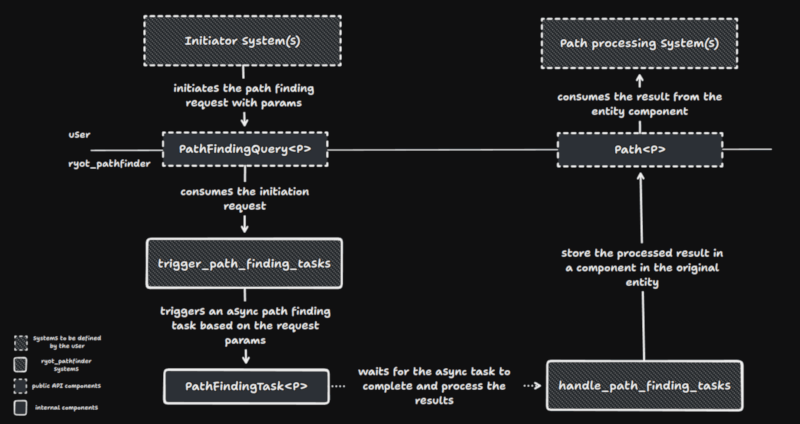
Workflow
The flow happens in four steps:
PathFindingQuery<P>is added to the entity, specifying the parameters for the pathfinding algorithm.PathFindingQuery<P>is consumed bytrigger_path_finding_taskssystem, which creates aPathFindingTask<P>and attaches it to the entity.PathFindingTask<P>is executed asynchronously, and once it completes, thehandle_path_finding_taskssystem creates aPath<P>component and attaches it to the entity.- The
Path<P>can now be consumed by the user to move the entity along the path.
To better understand how PathFindingQuery<P>, PathFindingTask<P>, and Path<P> interact, check the diagram below:
Examples
Choose an example to run based on your needs, such as handling multiple entities or dealing with obstacles:
cargo run --example example_name
Replace example_name with the name of the example you wish to run.
Understanding the Examples
Each example included in the library showcases different aspects of the pathfinding system:
- Basic: Demonstrates the simplest form of pathfinding.
- Multiple: Handles multiple actors navigating simultaneously.
- Obstacles: Integrates static obstacles within pathfinding calculations.
Experimenting with Advanced Scenarios
As you grow more comfortable, explore more complex examples like stress tests or integration with tile-based systems:
- Tiled*: Utilizes the
ryot_tiledfeature to perform pathfinding on a tiled map, using TilePosition and Flags. - Stress Test*: Evaluates the pathfinder's performance under high load conditions.
Those examples require the "ryot_tiled" feature to be enabled.
Building Your Own Scenarios
Leverage the ExampleBuilder to customize and create tailored pathfinding example/test scenarios:
fn main() {
// ExampleBuilder::<P/* custom pathable type */, N/* custom navigable type */>::new()
// .with_grid_size(/* custom dimension of a squared grid, default 10 */)
// .with_n_entities(/* number of actors to spawn, default 10 */)
// .with_n_obstacles(/* number of obstacles to spawn, default 0 */)
// .with_max_distance(/* maximum distance to calculate pathfinding, default 10 */)
// .with_sleep(/* sleep time (ms) between consuming pathfinding results, default 100 */)
// .with_navigable(/* custom navigable (N) value for obstacles, default N::default() */)
// .with_query_builder(/* custom query builder, default PathFindingQuery::new(pos).with_success_distance(0.) */)
// .drawing_app()
// .run();
}
Benchmarks
Performance benchmarks are included to provide insights into the crate's efficiency. The benchmark bench can be run to evaluate performance under various conditions:
cargo bench --features ryot_tiled
Results
| Test Name | Size | Time (ns/iter) | Variability (± ns) | Iterations per Second (iters/s) |
|---|---|---|---|---|
| bench_2_sized_path_finding | 2 | 137 | 2 | 7,299,270 |
| bench_3_sized_path_finding | 3 | 166 | 2 | 6,024,096 |
| bench_5_sized_path_finding | 5 | 285 | 6 | 3,508,772 |
| bench_10_sized_path_finding | 10 | 1,131 | 73 | 884,148 |
| bench_15_sized_path_finding | 15 | 3,272 | 188 | 305,709 |
| bench_20_sized_path_finding | 20 | 7,139 | 691 | 140,088 |
| bench_with_obstacles | 20 | 40,044 | 4,442 | 24,973 |
| bench_30_sized_path_finding | 30 | 21,406 | 831 | 46,726 |
| bench_50_sized_path_finding | 50 | 81,027 | 5,558 | 12,343 |
| bench_75_sized_path_finding | 75 | 225,945 | 86,525 | 4,424 |
| bench_100_sized_path_finding | 100 | 445,268 | 241,426 | 2,246 |
This README format clearly sections out the features, example usage, and benchmarks, providing a comprehensive guide for
anyone looking to integrate the ryot_pathfinder crate into their projects.
Dependencies
~20–33MB
~574K SLoC