1 unstable release
| 0.0.1 | Oct 23, 2024 |
|---|
#36 in #registration
91KB
887 lines
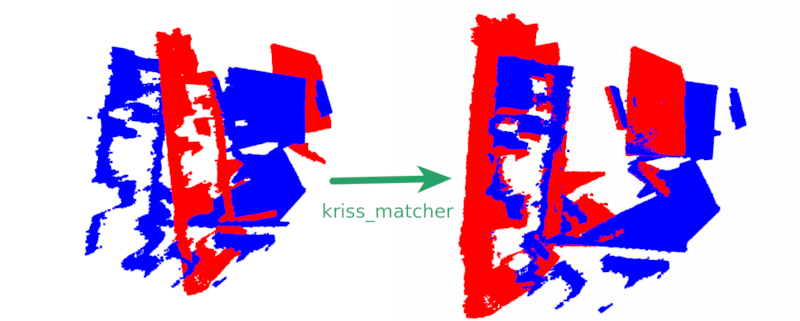
KRISS-Matcher: Rust/Python implementation of KISS-Matcher
The implementation of the paper KISS-Matcher: Fast and Robust Point Cloud Registration Revisited.
Disclaimer
This project is my first complete implementation in Rust, created out of curiosity and a desire to learn the language while implementing the concepts from the paper. It was developed over a weekend, so it may not be production-ready. Feedback and contributions are welcome!
Differences from the Original Paper
This implementation has some differences:
-
Single Radius Search:
- This implementation uses only
r_normalinstead of sub-sampling fromr_fpfh. There are no particular reasons, just to ease implementation since it seemed non-important.
- This implementation uses only
-
Histogram Bin Size:
- The paper does not specify the histogram bin size (
H) used in the calculation of FPFH (Fast Point Feature Histogram). More information on my choice is here.
- The paper does not specify the histogram bin size (
-
GNC Solver for Rotation and Translation Estimation:
- The paper does not provide details on the specific GNC (Graduated Non-Convexity) solver used.
- My implementation adapts the GNC-TLS (Truncated Least Squares) solver from the TEASER++ library.
- Residual calculation function adapts methods from Least-Squares Rigid Motion Using SVD.
-
Normal Estimation Using SVD Instead of PCA:
- The implementation uses Singular Value Decomposition (SVD) instead of Principal Component Analysis (PCA) for normal estimation.
- Since the matrices are small, performance is not a significant concern, and SVD provides more stable results.
-
Graph Representation in Correspondence Pruning:
- While the paper suggests using Compressed Sparse Row (CSR) representation for efficiency, this implementation uses a standard adjacency list graph (CSR can be easily integrated, tho).
Code Structure and Correspondence to Paper Sections
Section III.C. Faster-PFH: Boosting FPFH Speed
Also covers "Appendix.I. Detailed Explanation of Faster-PFH".
- Normal Estimation and filtering:
normal_estimation.rs - Point Feature Histogram Calculation:
point_feature_histograms.rs - Feature Matching:
feature_matching.rs
Section III.D. k-Core-Based Graph-Theoretic Outlier Pruning
- Correspondence Graph Pruning:
graph_pruning.rs
Section III.E. Graduated Non-Convexity-Based Non-Minimal Solver
- Optimal Rotation and Translation Estimation:
gnc_solver.rs
Usage
To add library to your rust project use:
$ cargo add kriss_matcher
To use in Python use any package managers such as pip or uv.
$ pip install kriss_matcher
or
$ uv add kriss_matcher
To run the example you can use:
uv run --no-project --python=3.11 examples/example.py
it will install all required dependencies.
Contributing
Feel free to open issues or submit pull requests if you find bugs or have suggestions for improvements.
License
This project is open-sourced under the Apache Version 2.0 License.
Dependencies
~18–56MB
~812K SLoC