15 releases
| 0.1.14 | Dec 5, 2024 |
|---|---|
| 0.1.13 | Aug 23, 2024 |
| 0.1.12 | Aug 29, 2023 |
| 0.1.11 | May 22, 2023 |
| 0.1.3 | Jun 13, 2021 |
#28 in Video
1,152 downloads per month
695KB
17K
SLoC
![]()
![]()
![]()
![]()
![]()
cameleon is a safe, fast, and flexible library for GenICam compatible cameras.
Overview
cameleon is a library for operating on GenICam compatible cameras.
Our main goal is to provide safe, fast, and flexible library for GenICam cameras.
Currently, cameleon supports only USB3 Vision cameras, but it's planned to support other protocols including GigE Vision. See Roadmap for more details.
Usage
USB3 Vision cameras
You need to install libusb to use USB3 Vision cameras, see How to install libusb.
First, add dependencies like below.
[dependencies]
cameleon = { version = "0.1", features = ["libusb"] }
Then, you can enumerate all cameras connected to the host, and start streaming.
use cameleon::u3v;
// Enumerates all cameras connected to the host.
let mut cameras = u3v::enumerate_cameras().unwrap();
if cameras.is_empty() {
println!("no camera found");
return;
}
let mut camera = cameras.pop().unwrap();
// Opens the camera.
camera.open().unwrap();
// Loads `GenApi` context. This is necessary for streaming.
camera.load_context().unwrap();
// Start streaming. Channel capacity is set to 3.
let payload_rx = camera.start_streaming(3).unwrap();
for _ in 0..10 {
let payload = match payload_rx.recv_blocking() {
Ok(payload) => payload,
Err(e) => {
println!("payload receive error: {e}");
continue;
}
};
println!(
"payload received! block_id: {:?}, timestamp: {:?}",
payload.id(),
payload.timestamp()
);
if let Some(image_info) = payload.image_info() {
println!("{:?}\n", image_info);
let image = payload.image();
// do something with the image.
// ...
}
// Send back payload to streaming loop to reuse the buffer. This is optional.
payload_rx.send_back(payload);
}
// Closes the camera.
camera.close().unwrap();
More examples can be found here.
Project Layout
Cameleon consists of several crates.
cameleon: Provides high-level APIs to control cameras. This is the primary crate.cameleon-genapi: Provides parser and interpreter ofGenApiXML.cameleon-device: Provides device specific protocol decoder and basic I/O operations for devices, also provides emulators.cameleon-gentl: ProvidesGenTLinterfaces as a C library.cameleon-impl: Provides internal APIs for other crates.cameleon-implis intended to be used only bycameleonproject.cameleon-impl-macros: Provides procedural macros for other crates.cameleon-impl-macrosis intended to be used only bycameleonproject.
FAQ
USB3 Vision
How to install libusb?
Linux/macOS
You need to install libusb to the place where pkg-config can find. Basically all you have to do is just installing libusb through your system package manager like sudo apt install libusb-1.0-0-dev or brew install libusb.
If you use Linux, it's probably needed to edit permissions for USB devices. You could add permissions by editing udev rules, a configuration example is found here.
Windows
You need to install libusb with vcpkg, please see here to install libusb with vcpkg.
Also, you need to install a driver for your device. You can find resource here for driver-installation.
NOTE: Make sure to install a driver to a composite device not to its child devices.
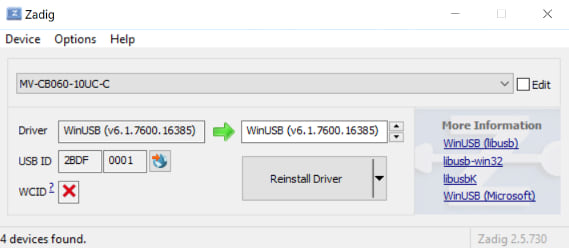
To do this, you need to list all devices connected to the host computer with zadig like below.
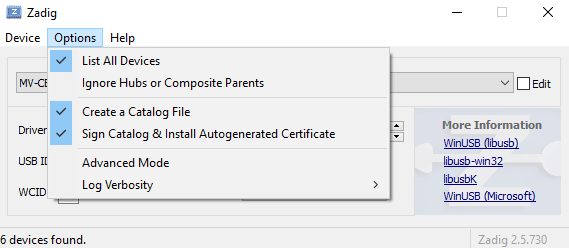
Then install WinUSB to your device.
Why is frame rate so low?
Frame rate can be affected by several reasons.
- Parameter settings of the camera
AcquisitionFrameRate and ExposureTime directly affect frame rate. So you need to setup the parameters first to improve frame rate.
Also, if DeviceLinkThroughputLimitMode is set to On, you would need to increase the value of DeviceLinkThroughputLimit.
- Many devices are streaming simultaneously on the same USB host controller
In this case, it's recommended to allocate the equal throughput limit to the connected cameras, making sure that the total throughput does not exceed the maximum bandwidth of the host controller.
usbfs_memory_mbis set to low value
If you use Linux, you may need to increase usbfs_memory_mb limit.
By default, USB-FS on Linux systems only allows 16 MB of buffer memory for all USB devices. This is quite low for high-resolution image streaming.
We recommend you to set the value to 1000MB. You could set the value as following:
echo 1000 > /sys/module/usbcore/parameters/usbfs_memory_mb
Roadmap
v0.2.0
- Add support for
GigEcameras - Impelment emulator
- Add support for saving and loading camera parameters
v0.3.0
- Implement payload chunk parser
- Add support for
GenTL
v0.4.0
- Add support for
UVCcameras
Release cycle
We continuously update the minor version every four weeks, until the version reaches 1.0.0.
Contributing
Thank you for your interest in contributing to Cameleon! We are so happy to have you join the development.
To start developing, please refer to CONTRIBUTING.md.
License
This project is licenced under MPL 2.0.
Dependencies
~3.5–5MB
~94K SLoC